Triple Pendulum CHAOS!
Earlier this week a tweet made the rounds which features a video that nicely demonstrates chaotic dynamical systems in action:
A visualization of chaos: 41 triple pendulums with very slightly different initial conditions pic.twitter.com/CTiABFVWHW
— Fermat's Library (@fermatslibrary) March 5, 2017
Edit: a reader pointed out that the original creator of this animation posted it on reddit in 2016.
Naturally, I immediately wondered whether I could reproduce this simlulation in Python. This post is the result.
This should have been pretty easy. After all, a while back I wrote a Matplotlib Animation Tutorial containing a double pendulum example, simulated in Python using SciPy's odeint solver and animated using matplotlib's animation module.
All we need to do is to extend that to a three-segment pendulum, and we're good to go, right?
Unfortunately, things are not so simple. While the double pendulum equations of motion can be solved relatively straightforwardly, the equations for a triple pendulum are much more involved. For example, the appendix of this document lists the three coupled second-order differential equations that govern the motion of the a triple pendulum; here's a screenshot of just the first of those three:
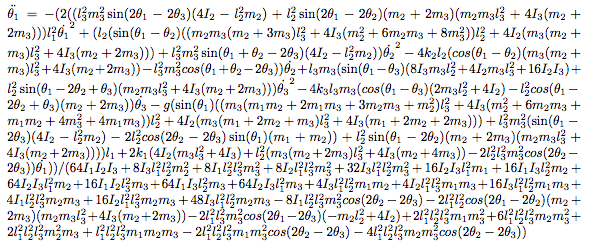
Yikes.
Fortunately, there are easier approaches than brute-force algebra, that rely on higher abstractions: one such approach is known as Kane's Method. This method still involves a significant amount of book-keeping for any but the most trivial problems, but the Sympy package has a nice implementation that handles the details for you. This is the approach I took to simulate the triple pendulum, borrowing heavily from Gede et al. 2013 who present a nice example of Sympy's API for applying Kane's Method.
The Code¶
The following function defines and solves the equations of motion for a system of n pendulums, with arbitrary masses and lengths. It's a bit long, but hopefully commented well enough that you can follow along.
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
from sympy import symbols
from sympy.physics import mechanics
from sympy import Dummy, lambdify
from scipy.integrate import odeint
def integrate_pendulum(n, times,
initial_positions=135,
initial_velocities=0,
lengths=None, masses=1):
"""Integrate a multi-pendulum with `n` sections"""
#-------------------------------------------------
# Step 1: construct the pendulum model
# Generalized coordinates and velocities
# (in this case, angular positions & velocities of each mass)
q = mechanics.dynamicsymbols('q:{0}'.format(n))
u = mechanics.dynamicsymbols('u:{0}'.format(n))
# mass and length
m = symbols('m:{0}'.format(n))
l = symbols('l:{0}'.format(n))
# gravity and time symbols
g, t = symbols('g,t')
#--------------------------------------------------
# Step 2: build the model using Kane's Method
# Create pivot point reference frame
A = mechanics.ReferenceFrame('A')
P = mechanics.Point('P')
P.set_vel(A, 0)
# lists to hold particles, forces, and kinetic ODEs
# for each pendulum in the chain
particles = []
forces = []
kinetic_odes = []
for i in range(n):
# Create a reference frame following the i^th mass
Ai = A.orientnew('A' + str(i), 'Axis', [q[i], A.z])
Ai.set_ang_vel(A, u[i] * A.z)
# Create a point in this reference frame
Pi = P.locatenew('P' + str(i), l[i] * Ai.x)
Pi.v2pt_theory(P, A, Ai)
# Create a new particle of mass m[i] at this point
Pai = mechanics.Particle('Pa' + str(i), Pi, m[i])
particles.append(Pai)
# Set forces & compute kinematic ODE
forces.append((Pi, m[i] * g * A.x))
kinetic_odes.append(q[i].diff(t) - u[i])
P = Pi
# Generate equations of motion
KM = mechanics.KanesMethod(A, q_ind=q, u_ind=u,
kd_eqs=kinetic_odes)
fr, fr_star = KM.kanes_equations(forces, particles)
#-----------------------------------------------------
# Step 3: numerically evaluate equations and integrate
# initial positions and velocities – assumed to be given in degrees
y0 = np.deg2rad(np.concatenate([np.broadcast_to(initial_positions, n),
np.broadcast_to(initial_velocities, n)]))
# lengths and masses
if lengths is None:
lengths = np.ones(n) / n
lengths = np.broadcast_to(lengths, n)
masses = np.broadcast_to(masses, n)
# Fixed parameters: gravitational constant, lengths, and masses
parameters = [g] + list(l) + list(m)
parameter_vals = [9.81] + list(lengths) + list(masses)
# define symbols for unknown parameters
unknowns = [Dummy() for i in q + u]
unknown_dict = dict(zip(q + u, unknowns))
kds = KM.kindiffdict()
# substitute unknown symbols for qdot terms
mm_sym = KM.mass_matrix_full.subs(kds).subs(unknown_dict)
fo_sym = KM.forcing_full.subs(kds).subs(unknown_dict)
# create functions for numerical calculation
mm_func = lambdify(unknowns + parameters, mm_sym)
fo_func = lambdify(unknowns + parameters, fo_sym)
# function which computes the derivatives of parameters
def gradient(y, t, args):
vals = np.concatenate((y, args))
sol = np.linalg.solve(mm_func(*vals), fo_func(*vals))
return np.array(sol).T[0]
# ODE integration
return odeint(gradient, y0, times, args=(parameter_vals,))
Extracting Positions¶
The function above returns generalized coordinates, which in this case are the angular position and velocity of each pendulum segment, relative to vertical. To visualize the pendulum, we need a quick utility to extract x and y coordinates from these angular coordinates:
def get_xy_coords(p, lengths=None):
"""Get (x, y) coordinates from generalized coordinates p"""
p = np.atleast_2d(p)
n = p.shape[1] // 2
if lengths is None:
lengths = np.ones(n) / n
zeros = np.zeros(p.shape[0])[:, None]
x = np.hstack([zeros, lengths * np.sin(p[:, :n])])
y = np.hstack([zeros, -lengths * np.cos(p[:, :n])])
return np.cumsum(x, 1), np.cumsum(y, 1)
Finally, we can call this function to simulate a pendulum at a set of times t. Here are the paths of a double pendulum over time:
t = np.linspace(0, 10, 1000)
p = integrate_pendulum(n=2, times=t)
x, y = get_xy_coords(p)
plt.plot(x, y);

And here are the positions of a triple pendulum over time:
p = integrate_pendulum(n=3, times=t)
x, y = get_xy_coords(p)
plt.plot(x, y);

Pendulum Animations¶
The static plots above provide a bit of insight into the situation, but it's much more intuitive to see the results as an animation. Drawing from the double pendulum code in my Animation Tutorial, here is a function to animate the pendulum's motion over time:
from matplotlib import animation
def animate_pendulum(n):
t = np.linspace(0, 10, 200)
p = integrate_pendulum(n, t)
x, y = get_xy_coords(p)
fig, ax = plt.subplots(figsize=(6, 6))
fig.subplots_adjust(left=0, right=1, bottom=0, top=1)
ax.axis('off')
ax.set(xlim=(-1, 1), ylim=(-1, 1))
line, = ax.plot([], [], 'o-', lw=2)
def init():
line.set_data([], [])
return line,
def animate(i):
line.set_data(x[i], y[i])
return line,
anim = animation.FuncAnimation(fig, animate, frames=len(t),
interval=1000 * t.max() / len(t),
blit=True, init_func=init)
plt.close(fig)
return anim
anim = animate_pendulum(3)
In the notebook, you can embed the resulting animation using the following snippet:
from IPython.display import HTML
HTML(anim.to_html5_video())
Embedding videos directly like this can lead to very large file sizes for notebooks (and blog posts!), so instead I've saved the animation and will load it with an HTML5 video tag. This is less portable (because the video file is separate from the notebook) but avoids embedding the entire content of the video into the single notebook file.
from IPython.display import HTML
# anim.save('triple-pendulum.mp4', extra_args=['-vcodec', 'libx264'])
HTML('<video controls loop src="http://leeblog.org/videos/triple-pendulum.mp4" />')
The nice part about the Kane method implemented above is that it readily generalizes to larger compound pendulums; for example, here is an animation of a 5-part "quintuple pendulum". It takes a bit longer to run, but can be computed with the same code:
anim = animate_pendulum(5)
# HTML(anim.to_html5_video()) # uncomment to embed
# anim.save('quintuple-pendulum.mp4', extra_args=['-vcodec', 'libx264'])
HTML('<video controls loop src="http://leeblog.org/videos/quintuple-pendulum.mp4" />')
And a Butterfly Flaps its Wings...¶
And now back to the motivation of this post: illustrating the chaotic results of small perturbations in initial conditions. The following code animates any specified number of nearly identical pendulums, each with a starting location perturbed slightly (here by about one part in a million):
from matplotlib import collections
def animate_pendulum_multiple(n, n_pendulums=41, perturbation=1E-6, track_length=15):
oversample = 3
track_length *= oversample
t = np.linspace(0, 10, oversample * 200)
p = [integrate_pendulum(n, t, initial_positions=135 + i * perturbation / n_pendulums)
for i in range(n_pendulums)]
positions = np.array([get_xy_coords(pi) for pi in p])
positions = positions.transpose(0, 2, 3, 1)
# positions is a 4D array: (npendulums, len(t), n+1, xy)
fig, ax = plt.subplots(figsize=(6, 6))
fig.subplots_adjust(left=0, right=1, bottom=0, top=1)
ax.axis('off')
ax.set(xlim=(-1, 1), ylim=(-1, 1))
track_segments = np.zeros((n_pendulums, 0, 2))
tracks = collections.LineCollection(track_segments, cmap='rainbow')
tracks.set_array(np.linspace(0, 1, n_pendulums))
ax.add_collection(tracks)
points, = plt.plot([], [], 'ok')
pendulum_segments = np.zeros((n_pendulums, 0, 2))
pendulums = collections.LineCollection(pendulum_segments, colors='black')
ax.add_collection(pendulums)
def init():
pendulums.set_segments(np.zeros((n_pendulums, 0, 2)))
tracks.set_segments(np.zeros((n_pendulums, 0, 2)))
points.set_data([], [])
return pendulums, tracks, points
def animate(i):
i = i * oversample
pendulums.set_segments(positions[:, i])
sl = slice(max(0, i - track_length), i)
tracks.set_segments(positions[:, sl, -1])
x, y = positions[:, i].reshape(-1, 2).T
points.set_data(x, y)
return pendulums, tracks, points
interval = 1000 * oversample * t.max() / len(t)
anim = animation.FuncAnimation(fig, animate, frames=len(t) // oversample,
interval=interval,
blit=True, init_func=init)
plt.close(fig)
return anim
anim = animate_pendulum_multiple(3)
# HTML(anim.to_html5_video()) # uncomment to embed
# anim.save('triple-pendulum-chaos.mp4', extra_args=['-vcodec', 'libx264'])
HTML('<video controls loop src="http://leeblog.org/videos/triple-pendulum-chaos.mp4" />')
Quite similar to the video that made the rounds on twitter, but the benefit here is that the result can be reproduced from scratch with the above code.
Thanks for reading!